|
MOOS 0.2375
|
|
MOOS 0.2375
|
#include <MOOSNavEntity.h>
Classes | |
| class | CState |
Public Types | |
| enum | Type { FIXED, POSE_ONLY, POSE_AND_RATE } |
Public Member Functions | |
| bool | RefreshStateCovariance () |
| bool | RefreshStateVector () |
| virtual bool | FillModelMatrices (Matrix &F, Matrix &Q, Matrix &Xhat, double dfDeltaT)=0 |
| bool | SetEntityType (CMOOSNavEntity::Type eType) |
| CMOOSNavEntity::Type | GetEntityType () |
| virtual int | GetStateSize ()=0 |
| virtual bool | GetFullState (Matrix &Result, Matrix *m_pXToUse=NULL, bool bUseEstimate=true)=0 |
| virtual bool | RefreshState ()=0 |
| CMOOSNavSensor * | GetSensorByName (const string &sName) |
| CMOOSNavSensor * | GetSensorByType (CMOOSNavSensor::Type eType) |
| bool | AddSensor (CMOOSNavSensor *pSensor) |
| CMOOSNavEntity () | |
| virtual | ~CMOOSNavEntity () |
Public Attributes | |
| Type | m_eType |
| SENSOR_MAP | m_SensorMap |
| map of named sensors on vehicle | |
| int | m_nStart |
| index to start of object in matrices | |
| int | m_nEnd |
| index to end of object in matrices | |
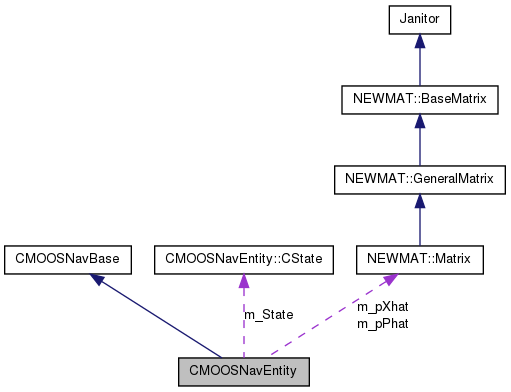
| Matrix * | m_pXhat |
| pointer to estimated statevector | |
| Matrix * | m_pPhat |
| pointer to estimated statevector covariance | |
| CState | m_State |
Definition at line 49 of file MOOSNavEntity.h.
| enum CMOOSNavEntity::Type |
Definition at line 57 of file MOOSNavEntity.h.
| CMOOSNavEntity::CMOOSNavEntity | ( | ) |
Definition at line 42 of file MOOSNavEntity.cpp.
| CMOOSNavEntity::~CMOOSNavEntity | ( | ) | [virtual] |
Definition at line 48 of file MOOSNavEntity.cpp.
| bool CMOOSNavEntity::AddSensor | ( | CMOOSNavSensor * | pSensor | ) |
Definition at line 79 of file MOOSNavEntity.cpp.
| virtual bool CMOOSNavEntity::FillModelMatrices | ( | Matrix & | F, |
| Matrix & | Q, | ||
| Matrix & | Xhat, | ||
| double | dfDeltaT | ||
| ) | [pure virtual] |
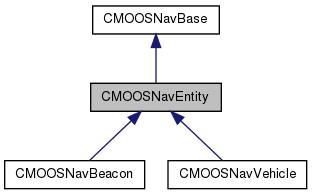
Implemented in CMOOSNavBeacon, and CMOOSNavVehicle.
| CMOOSNavEntity::Type CMOOSNavEntity::GetEntityType | ( | ) | [inline] |
Definition at line 66 of file MOOSNavEntity.h.
| virtual bool CMOOSNavEntity::GetFullState | ( | Matrix & | Result, |
| Matrix * | m_pXToUse = NULL, |
||
| bool | bUseEstimate = true |
||
| ) | [pure virtual] |
Implemented in CMOOSNavBeacon, and CMOOSNavVehicle.
| CMOOSNavSensor * CMOOSNavEntity::GetSensorByName | ( | const string & | sName | ) |
Definition at line 96 of file MOOSNavEntity.cpp.
| CMOOSNavSensor * CMOOSNavEntity::GetSensorByType | ( | CMOOSNavSensor::Type | eType | ) |
Definition at line 107 of file MOOSNavEntity.cpp.
| virtual int CMOOSNavEntity::GetStateSize | ( | ) | [pure virtual] |
Implemented in CMOOSNavBeacon, and CMOOSNavVehicle.
| virtual bool CMOOSNavEntity::RefreshState | ( | ) | [pure virtual] |
Implemented in CMOOSNavBeacon, and CMOOSNavVehicle.
| bool CMOOSNavEntity::RefreshStateCovariance | ( | ) |
Definition at line 142 of file MOOSNavEntity.cpp.
| bool CMOOSNavEntity::RefreshStateVector | ( | ) |
Definition at line 127 of file MOOSNavEntity.cpp.
| bool CMOOSNavEntity::SetEntityType | ( | CMOOSNavEntity::Type | eType | ) | [inline] |
Definition at line 65 of file MOOSNavEntity.h.
Definition at line 64 of file MOOSNavEntity.h.
index to end of object in matrices
Definition at line 90 of file MOOSNavEntity.h.
index to start of object in matrices
Definition at line 87 of file MOOSNavEntity.h.
pointer to estimated statevector covariance
Definition at line 95 of file MOOSNavEntity.h.
pointer to estimated statevector
Definition at line 93 of file MOOSNavEntity.h.
map of named sensors on vehicle
Definition at line 84 of file MOOSNavEntity.h.
Definition at line 127 of file MOOSNavEntity.h.
 1.7.4
1.7.4

