The goby_frontseat_interface application provides a common application for handling plugins for different vehicle control computers (Bluefin, Iver, WaveGlider, etc.). The goal is to reduce the duplication of effort required to support a new vehicle platform with an autonomy system written in Goby3.
This is the Goby version of the MOOS `iFrontSeat`. The two applications share the same drivers and motivation, so it is worth reading the iFrontSeat documentation as well.
goby_frontseat_interface is effectively a mediator between two interfaces: the Helm Interface (providing desired setpoints of heading, speed, depth, etc.) and the Vehicle Interface (carrying out the desired setpoints and providing low-level data).
Publish/subscribe
The groups are defined in
and the Protobuf messages are in goby/src/middleware/protobuf/frontseat.proto and can be included using:
API Diagram
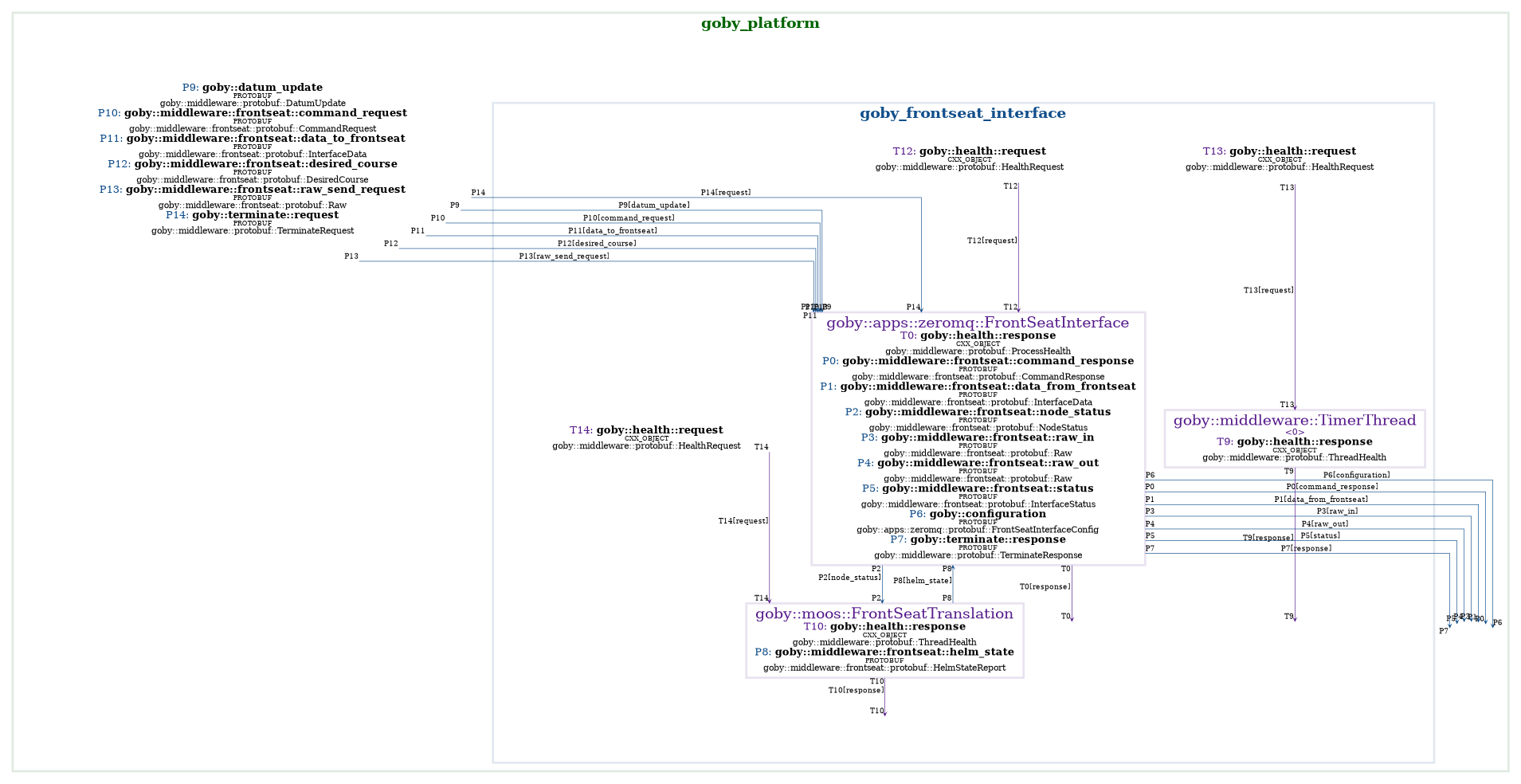
Helm Interface
The Helm Interface must provide the following publications:
- Group: goby::middleware::frontseat::groups::desired_course, Message: goby::middleware::frontseat::protobuf::DesiredCourse: Desired heading, speed, depth, etc. for the vehicle.
- Group: goby::middleware::frontseat::groups::helm_state, Message: goby::middleware::frontseat::protobuf::HelmStateReport: State of the Helm (either HELM_DRIVE for the Helm is ready to drive or HELM_PARK for the Helm is in a standby mode).
It must also subscribe to:
- Group: goby::middleware::frontseat::groups::node_status, Message: goby::middleware::frontseat::protobuf::NodeStatus: Position, orientation, etc. of the vehicle.
goby_frontseat_interface has built-in support for the pHelmIvP application from MOOS-IvP or alternatively the user can provide this interface with a custom app.
MOOS-IvP
To use the MOOS-IvP interface, complete the [goby.moos.protobuf.moos_helm] configuration block:
and at a minimum run MOOSDB and pHelmIvP.
Vehicle Interface
The Vehicle Interface connects the vehicle API to Goby3. It is a subclass of goby::middleware::frontseat::InterfaceBase which is defined in
See the MOOS `iFrontSeat` document on writing this interface.
The Vehicle Interface must be compiled as a shared library that exposes a C function "frontseat_driver_load" which must have the signature:
This shared library is then loaded at runtime by goby_frontseat_interface using the environmental variable FRONTSEAT_DRIVER_LIBRARY, which is a path to a shared library containing the desired interface to run. This path must be fully qualified or on the ld library path (e.g. environmental variable LD_LIBRARY_PATH).
For example:
Configuration
The goby_frontseat_interface has one required configuration block:
- frontseat_cfg: Passed to the frontseat driver
- type: Vehicle type
- require_helm: Set false if the vehicle can run missions without a helm (Default: true)
- name: Omit: it is automatically set to
interprocess.platform. This configuration variable exists here exists for iFrontSeat support. - origin: Omit: it is automatically set to
app.geodesy.lat/lon_origin. This configuration variable exists here for iFrontSeat support.
You can set [goby.moos.protobuf.moos_helm] if using MOOS-IvP; see above.
Available drivers in Goby3
Basic Simulator
This driver shows how to use goby_frontseat_interface and provides an example for creating your own plugins. It can also be used for simple vehicle simulations.
This is run with the goby_basic_frontseat_simulator application which provides the vehicle interface and a basic motion model.
Additional configuration:
- frontseat_cfg
[goby.middleware.frontseat.protobuf.basic_simulator_config]: Configuration when running the basic simulator plugin.- tcp_address: Address of simulator
- tcp_port: Port of simulator
- start: Start location/pose of simulator.
See the goby_frontseat_interface configuration from the Goby3 course for a simple working example: https://github.com/GobySoft/goby3-course/blob/master/launch/alpha/usv_config/frontseat.pb.cfg, launched from https://github.com/GobySoft/goby3-course/blob/master/launch/alpha/usv.launch.
Bluefin
The goby_frontseat_interface_bluefin shell script runs goby_frontseat_interface with the plugin for the General Dynamics Bluefin Standard Payload Interface (SPI). This public SPI is not complete, so request a copy from Bluefin if possible.
Key additional configuration variables:
- frontseat_cfg:
[goby.middleware.frontseat.protobuf.bluefin_config]- huxley_tcp_address: Address for Huxley (Bluefin computer)
- huxley_tcp_port: Port for Huxley
See goby_frontseat_interface_bluefin -e for more configuration options.
Iver
The goby_frontseat_interface_iver shell script runs goby_frontseat_interface with the plugin for the L3Harris Iver AUV using the Iver "Remote Helm" interface.
Key additional configuration variables:
- frontseat_cfg:
[goby.middleware.frontseat.protobuf.iver_config]- serial_port: Serial port connected to Remote Helm
- serial_baud: Baud for serial_port
- remote_helm_version_major: Major version of Remote Helm (e.g., 5)
See goby_frontseat_interface_iver -e for more configuration options.
WaveGlider SV2
This is largely obsolete at this point given the end of life for the WaveGlider SV2, but the goby_frontseat_interface_waveglider shell script runs a plugin for the LiquidRobotics WaveGlider SV2.
Key additional configuration variables:
- frontseat_cfg:
[goby.middleware.frontseat.protobuf.waveglider_sv2_config]:- pm_serial_port: Serial port connected to the SV2 PM.
- pm_serial_baud: Baud for serial port
- board_id: 3
- task_id: 1