|
MOOS 0.2375
|
|
MOOS 0.2375
|
#include <math.h>#include "MOOSNavEntity.h"#include "MOOSNavVehicle.h"#include "MOOSNavBeacon.h"#include "MOOSNavSensor.h"#include "LBLMaths.h"#include "MOOSNavLibGlobalHelper.h"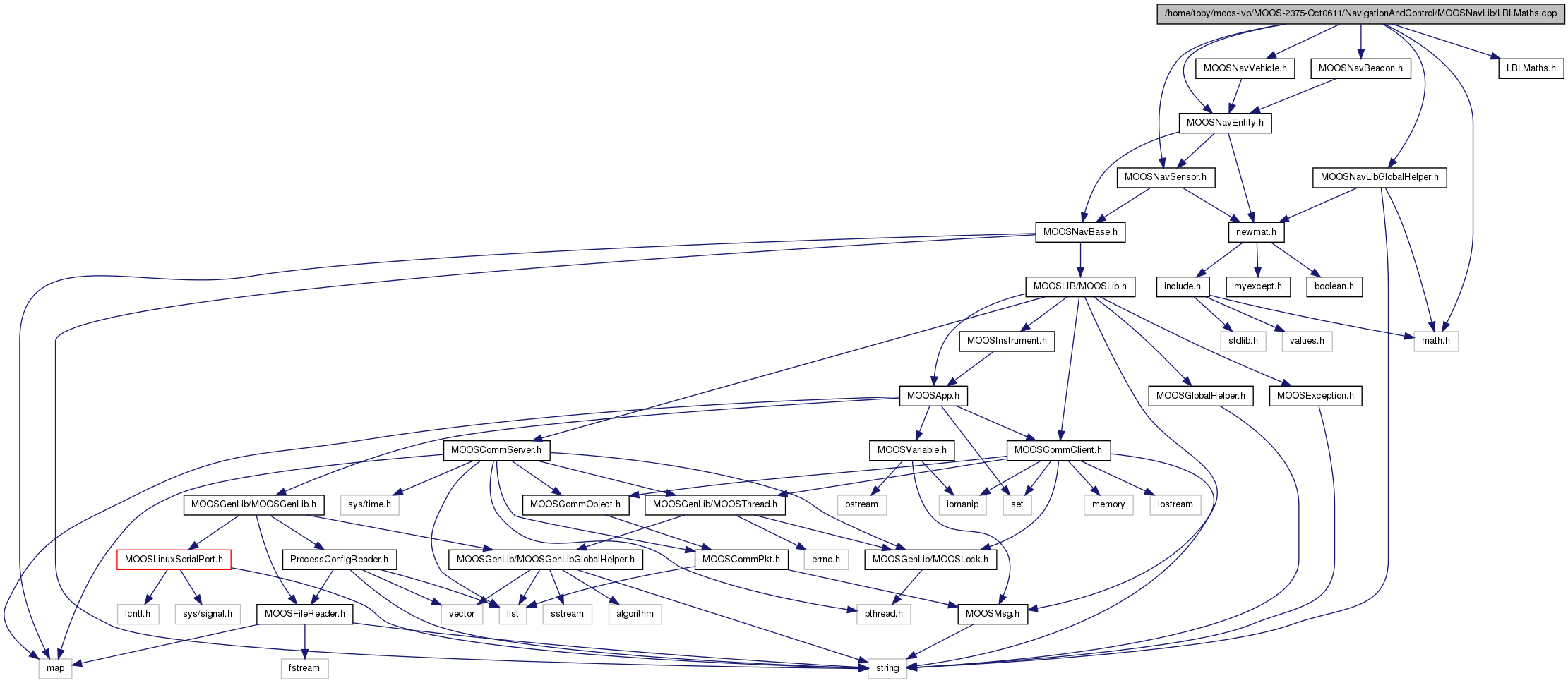
Go to the source code of this file.
Defines | |
| #define | Diff1_TT_wrt_State(a, b, c, a1, b1, c1, T) ((((T)==0)&&((b)==0))?0:(-((c1)+(b1)*(T)+(a1)*((c)+(T)*((b)+2*(a)*(T)))/(a))/((b)+2*(a)*(T)))) |
| #define Diff1_TT_wrt_State | ( | a, | |
| b, | |||
| c, | |||
| a1, | |||
| b1, | |||
| c1, | |||
| T | |||
| ) | ((((T)==0)&&((b)==0))?0:(-((c1)+(b1)*(T)+(a1)*((c)+(T)*((b)+2*(a)*(T)))/(a))/((b)+2*(a)*(T)))) |
Definition at line 45 of file LBLMaths.cpp.
 1.7.4
1.7.4

