goby_liaison is a C++ web server based on the Wt toolkit. It has several built-in "tabs" and users can write their own tabs and load them using shared libraries (dlopen). Each tab runs in its own thread and can be selected from a menu that runs along the left side of the web page.
The built-in tabs include:
- Commander: A form for allowing users to publish any Protobuf message on the intervehicle or interprocess layer. This is typically used for sending commands from an operator to one or more vehicles over the intervehicle layer.
- Scope: A live table showing the latest of all groups containing Protobuf messages published in the interprocess layer, and the ability to show a streaming history of any group. This is a helpful debugging tool, and can be thought of as the GUI equivalent of
goby zeromq subscribe.
Common Configuration
Several configuration values can be set regardless of the tabs in use:
http_address: IP address or hostname to bind on, e.g., '127.0.0.1' for IPv4 localhost or '0::0' for all addresses.http_port: Port to bind on, defaults to 54321. Set to80for the default HTTP port (but this usually requires root privileges and won't work if any other server such as Apache is running on that port).docroot: Path to Liaison static objects directory. This can typically be omitted unless you've installed goby_liaison somewhere non-standard.load_shared_library,load_proto_file,load_proto_dir: Three ways to specify Protobuf message definitions to load, which is required to decode any messages used by Commander or Scope.add_home_tab: Defaults to true - set false to omit the Home tab.add_scope_tab: Defaults to true - set false to omit the Scope tab.add_commander_tab: Defaults to true - set false to omit the Commander tab.
To access goby_liaison from the client side, open a web browser to http://<http_address>:<http_port>
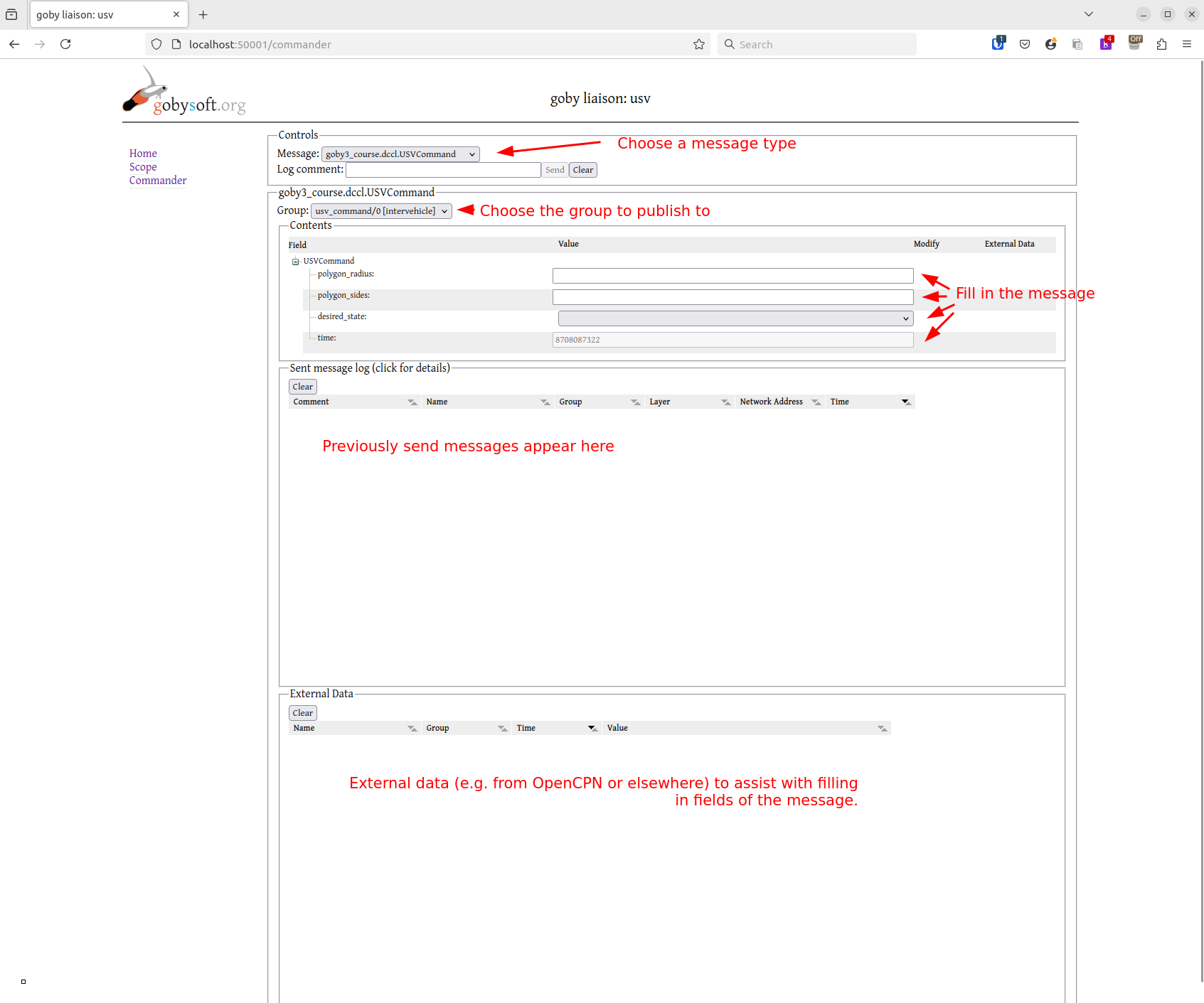
Commander
The following image shows the Liaison Commander using the USVCommand protobuf message from the Goby3 Course, before filling in the message:
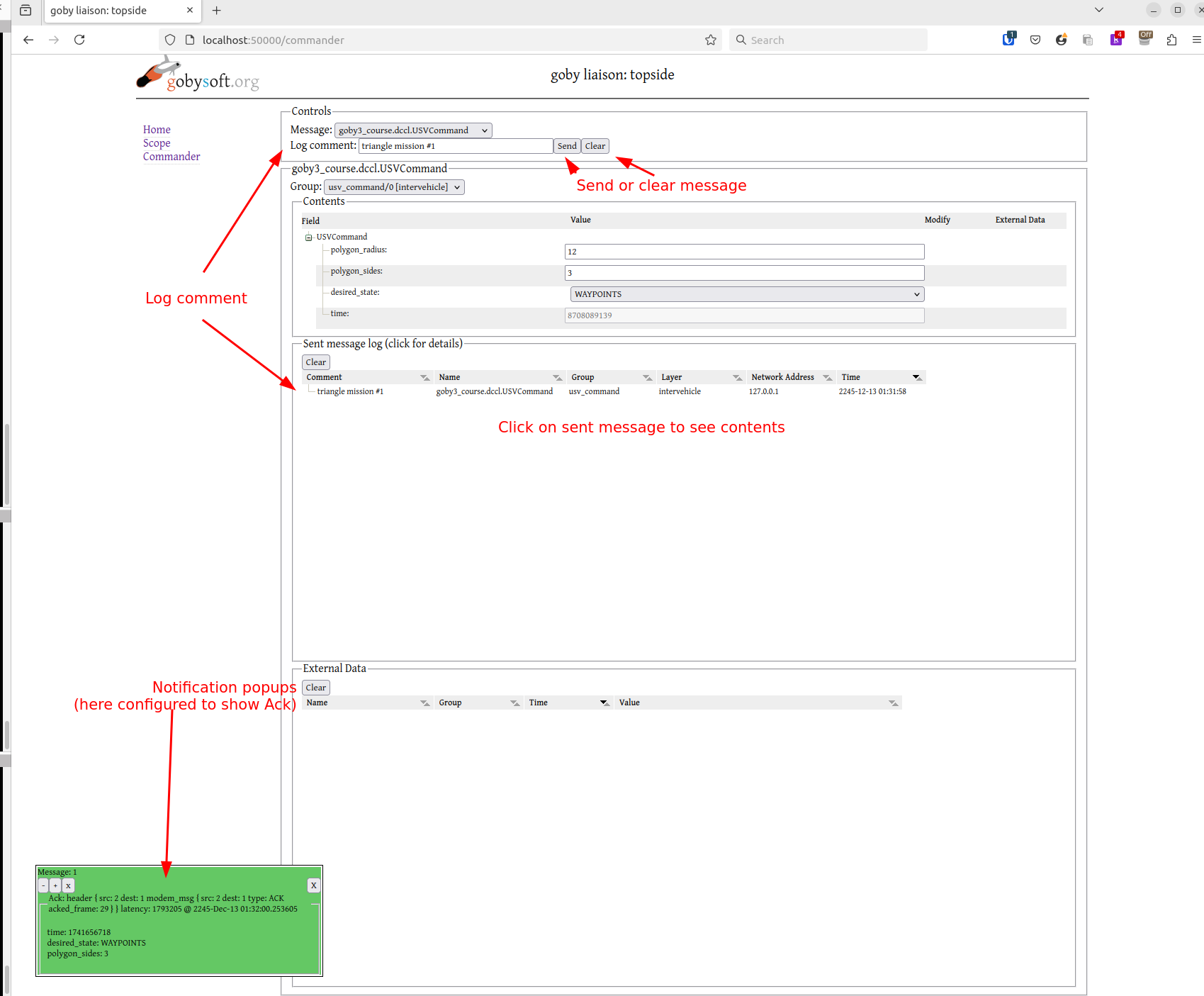
After filling in your message and sending it, your window will look something like this:
The relevant configuration for creating the Commander UI shown above is:
The pb_commander_config block informs goby_liaison of the messages to load and how to publish them after they are filled out and sent by the user:
- pb_commander_config;
- load_protobuf:
- name: Full protobuf name (
package.message). This Protobuf message must be "known" togoby_liaisonusingload_shared_library,load_proto_file, orload_proto_dir. - publish_to:
- group: The Goby group to publish to (string name)
- group_numeric: The numeric group (if any) to publish to (for the
intervehiclelayer).0is the "broadcast" group - layer: Enumeration for the layer to publish to (LAYER_INTERVEHICLE or LAYER_INTERPROCESS).
- external_data: Groups to subscribe to and parse for the "external data" tab
- name: Protobuf name
- group: Goby group to subscribe to
- translate: Map fields from this message to the message in Commander:
- from: external_data field (fully qualified using '.' separator)
- to: Commander message field (fully qualified using '.' separator)
- name: Full protobuf name (
- load_protobuf:
When using the LAYER_INTERPROCESS version of goby_liaison's Commander, this is equivalent to a GUI version of the command line tool goby zeromq publish.
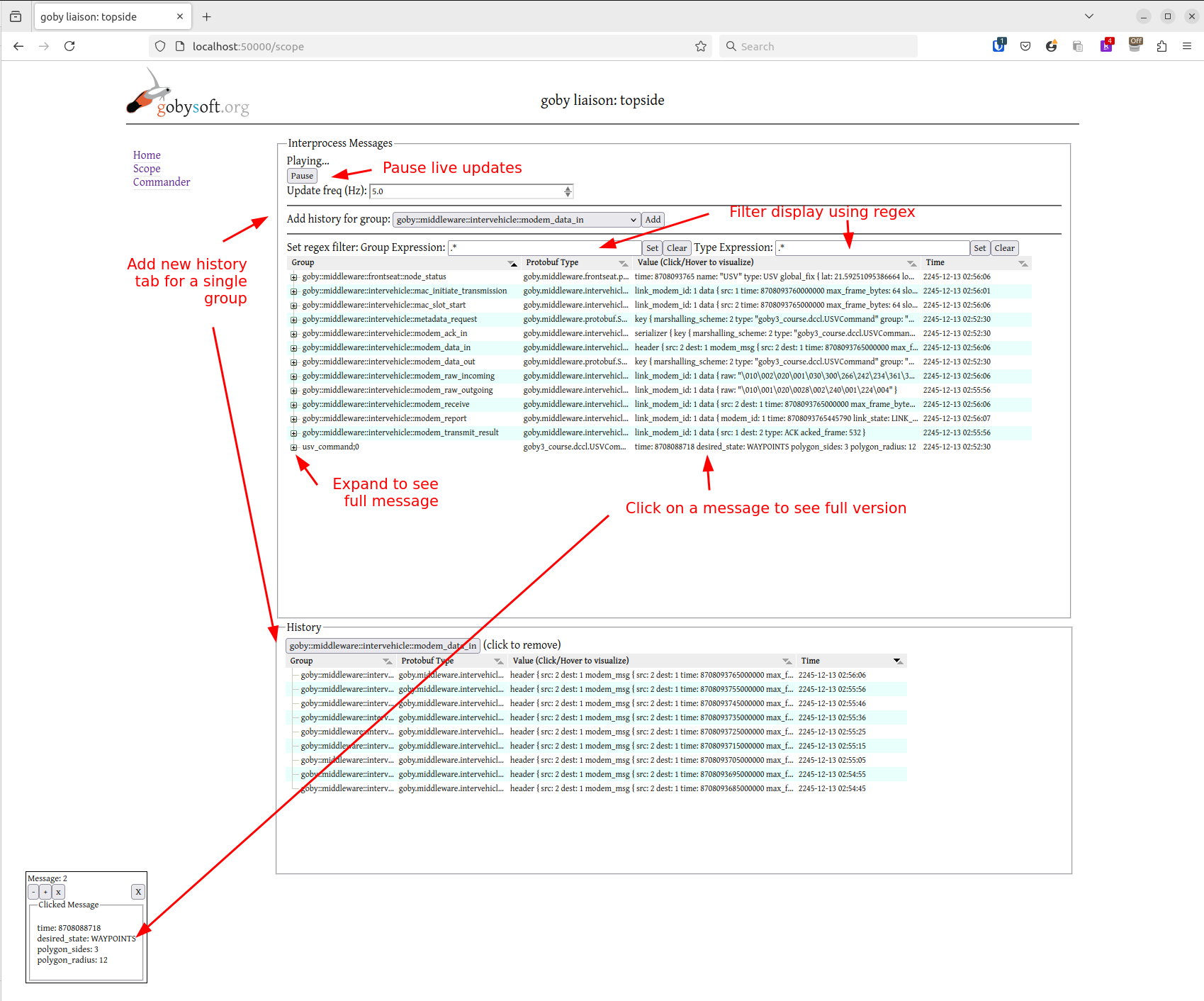
Scope
The goby_liaison Scope gives a live view of all the messages in the connected interprocess layer:
The default configuration is usually sufficient, but you can customize many of the settings to optimize for your own uses:
- pb_scope_config
- column_width: Customize initial width of all display columns
- group_width: "Group" column width (in pixels).
- type_width: "Protobuf Type" column width (in pixels).
- value_width: "Value" column width (in pixels).
- time_width: "Time" column width (in pixels).
- sort_by_column: Initial sort column (defaults to COLUMN_GROUP)
- sort_ascending: Defaults true, set false to sort descending.
- scope_height: in pixels
- history_height: in pixels
- group_regex_filter_expression: Initial regex, defaults to '.*' (show all groups).
- type_regex_filter_expression: Initial regex, defaults to '.*' (show all types).
- history: Always show history for one or more groups.
- max_history_items: Max number of history items show (circular buffer): Defaults to 100.
- max_message_size_bytes: Messages larger than this size are omitted to reduce CPU load. Defaults to 2048B.
- column_width: Customize initial width of all display columns
Writing your own tab
You can create and load your own tab in goby_liaison using the Wt toolbox and a shared library plugin (.so).
These open source examples will be helpful to explore while creating your own tab:
- The Jaiabot post-launch plugin (publish/subscribe): https://github.com/jaiarobotics/jaiabot/tree/1.y/src/lib/liaison/postlaunch
- The Jaiabot pre-launch plugin (no publish/subscribe, no gobyd): https://github.com/jaiarobotics/jaiabot/tree/1.y/src/lib/liaison/prelaunch
- The NETSIM plugin (publish/subscribe): https://github.com/GobySoft/netsim/tree/master/src/lib/liaison
Each tab is a subclass of goby::zeromq::LiaisonContainer (which is a Wt::WContainerWidget), which is defined in:
If your tab needs to publish/subscribe, you should subclass from goby::zeromq::LiaisonContainerWithComms (which is a goby::zeromq::LiaisonContaine) and pass your subclass of goby::zeromq::LiaisonCommsThread (which is a goby::middleware::SimpleThread) as a template parameter.
Your plugin library must define a C function goby3_liaison_load that is called by goby_liaison to load your tab(s). This function must have the following signature:
The usual parsed configuration file / command line parameters are available in cfg. You can extend the goby::apps::zeromq::protobuf::LiaisonConfig message (goby/zeromq/protobuf/liaison_config.proto) to allow your application to have specialized configuration. If you wish to use a public extension, create an Issue on Github and we will assign one. For private projects, simply choose any extension values in the range 10000-11000.
Finally to load your plugin, you need to define the environmental variable GOBY_LIAISON_PLUGINS with a comma, semicolon or colon delimited set of path(s) to shared libraries for goby_liaison to load. These shared libraries must be fully qualified paths or on the ld load path (e.g., using LD_LIBRARY_PATH).
A shell script can easily be defined to do all this for you (e.g., name the script goby_liaison_myproject so you can just run goby_liaison_myproject like you run goby_liaison and your tab(s) will always be loaded):
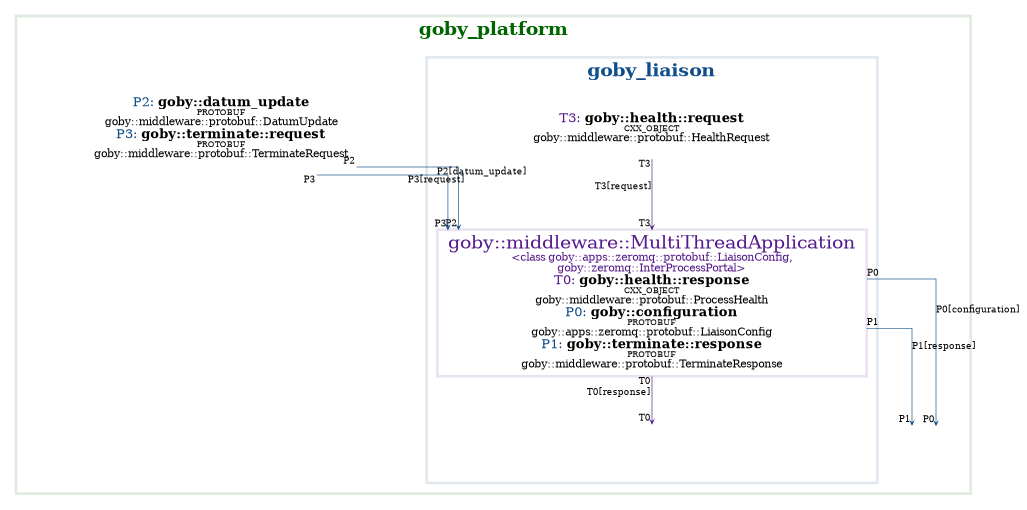
Publish/Subscribe API Diagram
(This figure excludes dynamic subscriptions / publications, which is the majority of what goby_liaison uses)