A key part of operating autonomous marine vehicles is the ability to visualize their locations. Goby provides interfaces to existing visualization tools for displaying marine vehicles.
goby_geov_interface
The GEOV project: https://github.com/GobySoft/geov lets you run a local server that provides data to Google Earth Pro.
The goby_geov_interface provides a client to the GEOV server to input vehicle position data from Goby3.
The key subscription for goby_geov_interface is:
Using the data from node_status, the correct MySQL insert is performed for GEOV.
Configuration variables are:
- simulation: If true, writes to GEOV as a simulation data source (default: false)
- mysql_host: IP Address or domain name for GEOV MYSQL server
- mysql_user: User name for GEOV input
- mysql_password: Password for GEOV input
- mysql_port: Port for GEOV MYSQL server
- position_report_interval: Seconds between position reports to enter into GEOV for a given vehicle (default: 1)
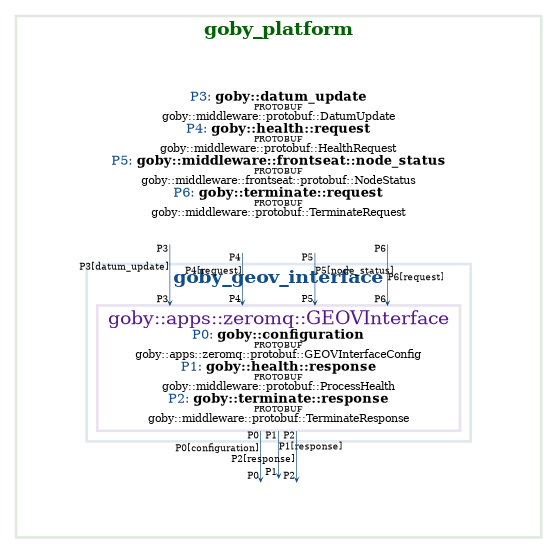
Publish/Subscribe API Diagram
goby_opencpn_interface
OpenCPN is an open source Chart Plotter Navigation software. This allows you to easily display other vessels, support vessel GPS position, ENC and RNC nautical charts, etc.
The goby_opencpn_interface allows you to input autonomous vehicle positions into OpenCPN as if they are AIS positions, without having to modify OpenCPN to do so.
OpenCPN setup
Install OpenCPN:
Add charts (for example all of Massachusetts):
Add connection:
Show AIS target tracks and names:
goby_opencpn_interface Configuration
The only significant configuration setting required is
Where the bind_port needs to match the port configured in the Connections tab of OpenCPN (previous section).
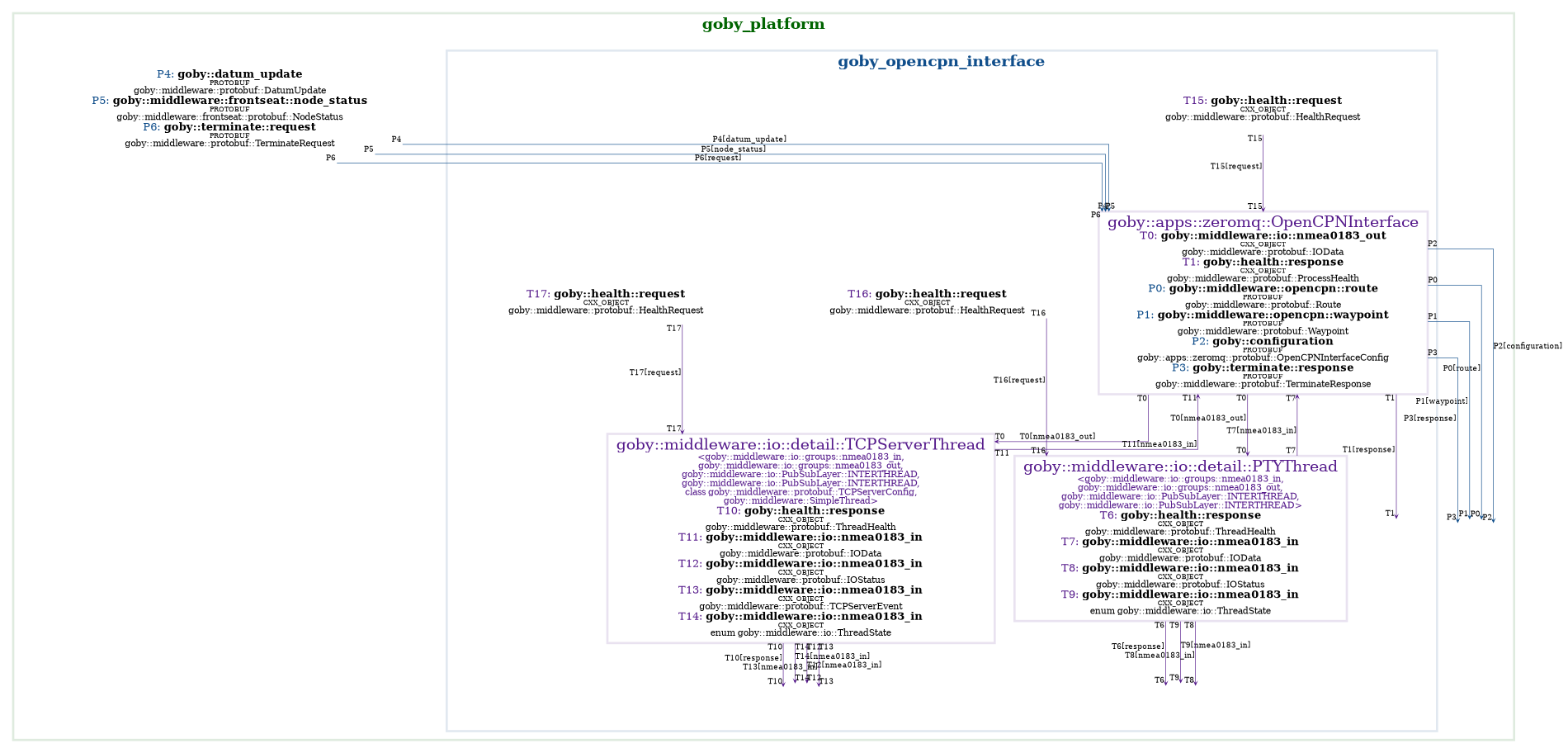
Publish/subscribe
The key subscription is the same as goby_geov_interface:
From the node_status, goby_opencpn_interface creates spoof AIS messages for this vehicle and sends them to all connected clients (OpenCPN in this case).
goby_geov_interface can also publish two variables:
These are published if you create a Route or Waypoint, respectively, in OpenCPN and then right click on it, choose "Send to GPS" and send it to the same port as goby_opencpn_interface (in the example above that would be "TCP:127.0.0.1:54000").
These publications can be mapped onto data fields in goby_liaison using the "External Data" functionality. This allows you to send positions and routes using the OpenCPN mapping software rather than manually entering latitude/longitude values into goby_liaison Commander.
Publish/Subscribe API Diagram