geov (pronounced "jove") is an extensible viewer based on google earth and php/mysql that allows both realtime and historical viewing of ocean vehicles. it is presently primarily a research tool for autonomous underwater vehicles and surface craft.
3.10.25: README added to Github page: https://github.com/GobySoft/geov, including script on how to install a local GEOV instance.
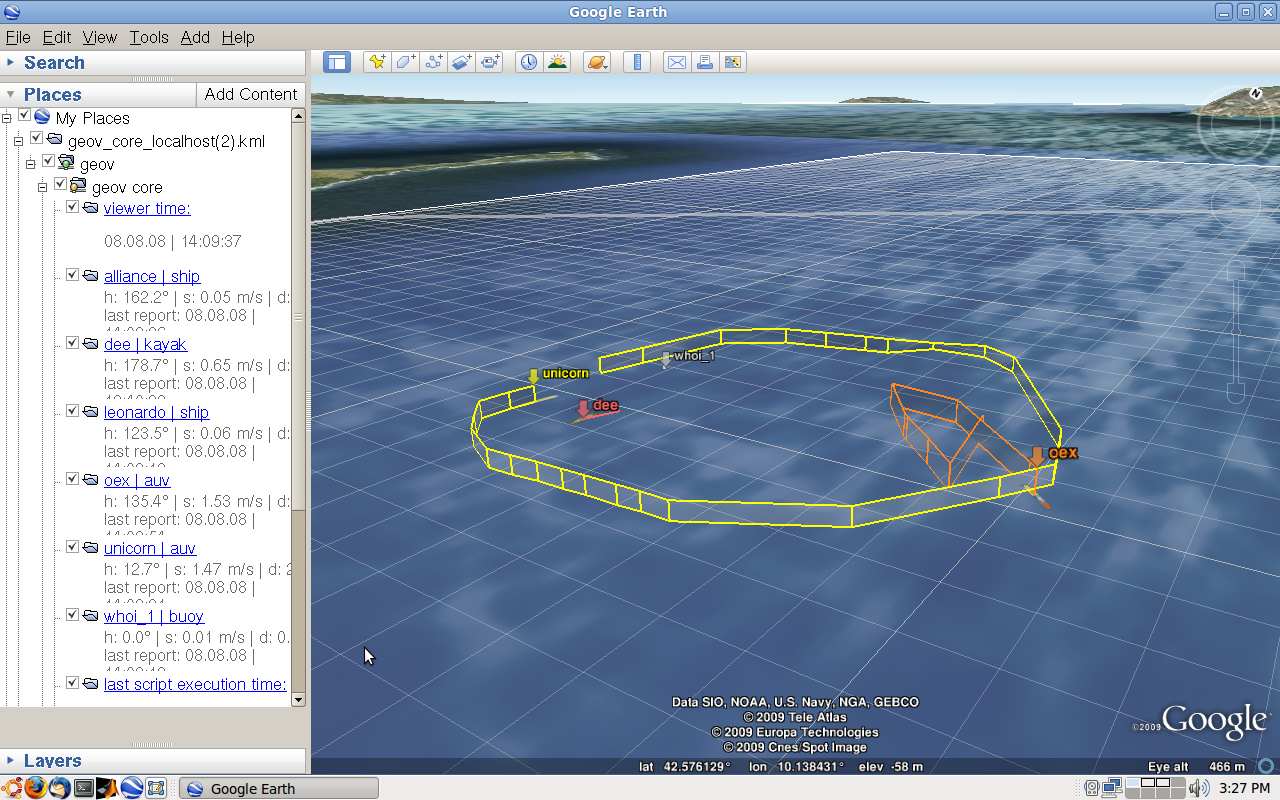
2.9.09: google earth version 5.0 released with support for bathymetry. geov has been updated to include depth display (see screenshot below). numerous bugs fixed and new features added: release notes .
10.20.08: data from glint (alliance server only) merged.
6.27.08: two new modules added in the last week: moos_nafcon_target shows vectors for target tracking using ONR PLUS messages. moos_opgrid overlays an operation region and (optionally) an xy grid.
6.23.08: server moved (physically) causing DNS change from aubergine.mit.edu -> aubergine.whoi.edu.
5.21.08: pAIS2SQL deprecated. use iMOOS2SQL which has more features and is backwards compatible.
4.21.08: google earth version 4.3 released and geov has been updated to work with it. this new version of ge has several new features and bug fixes so go download it.
example screenshot of new depth display for GE 5 (realtime / playback mode):
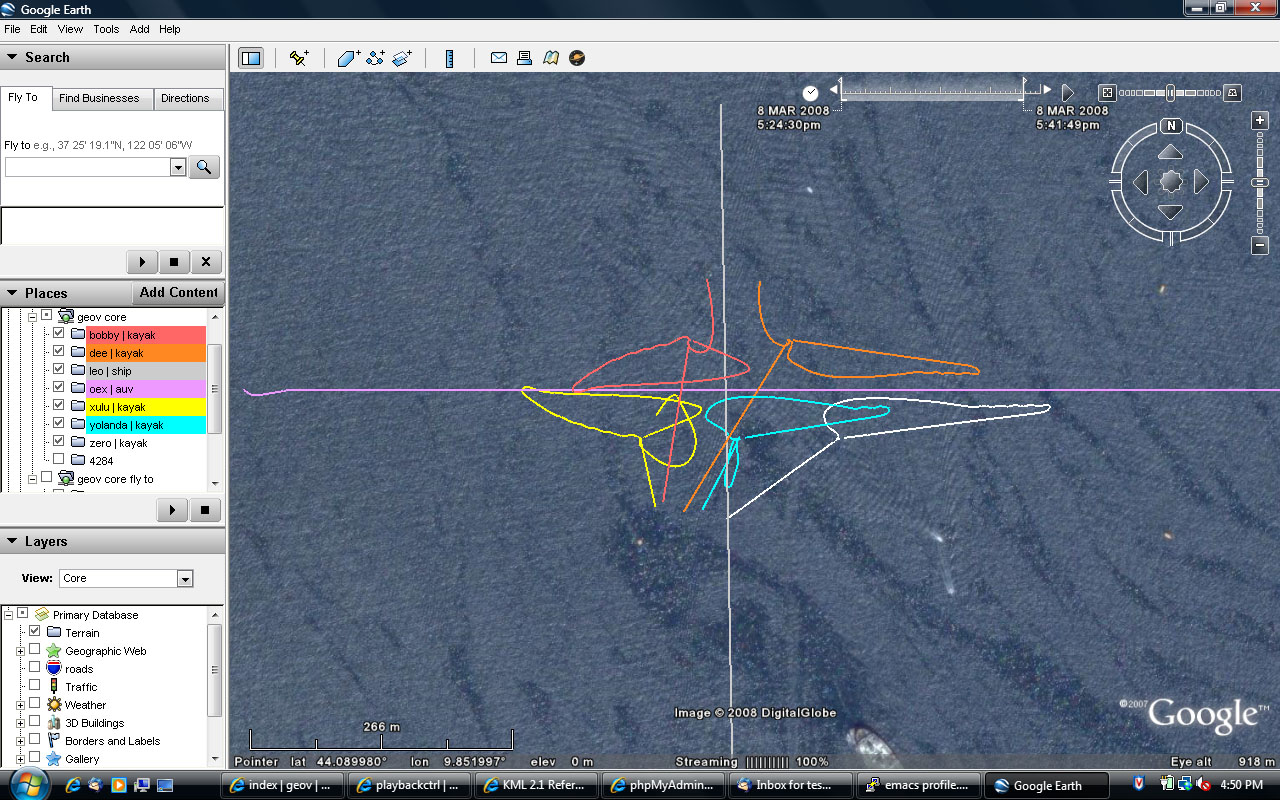
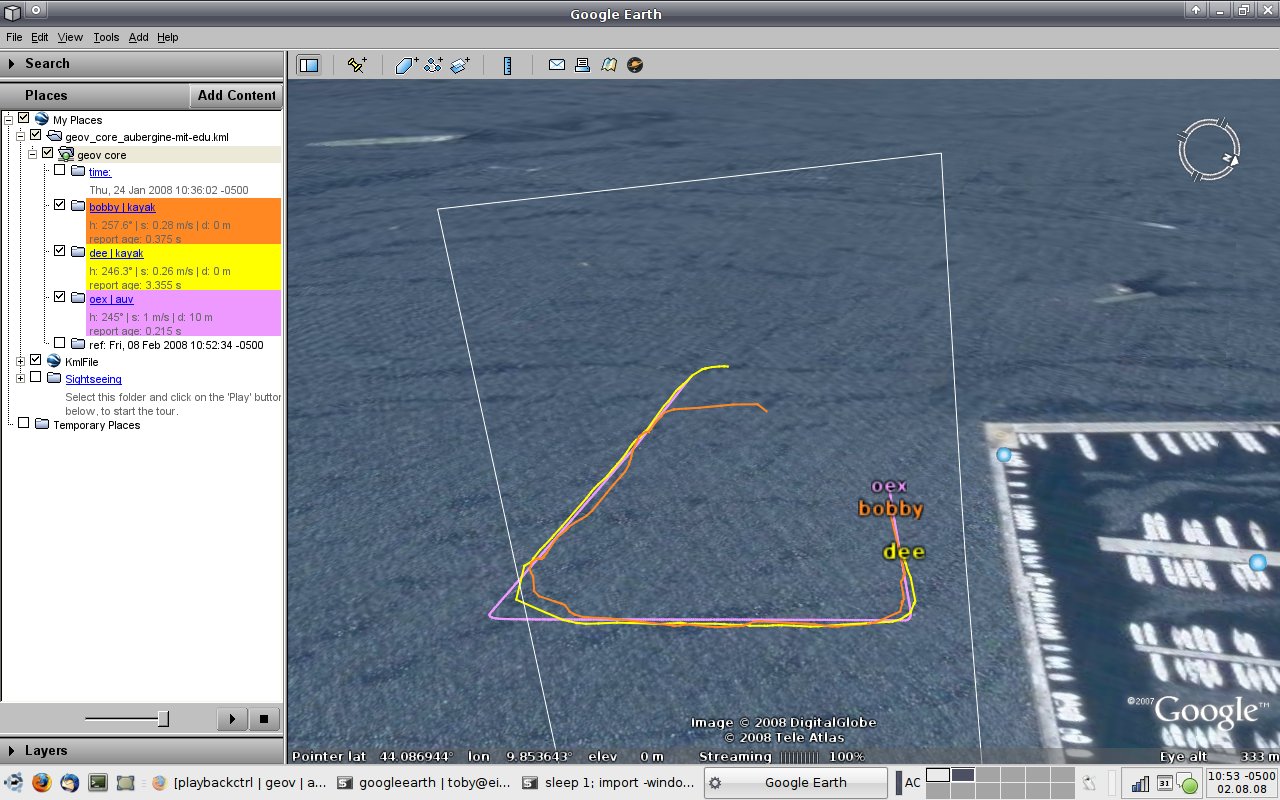
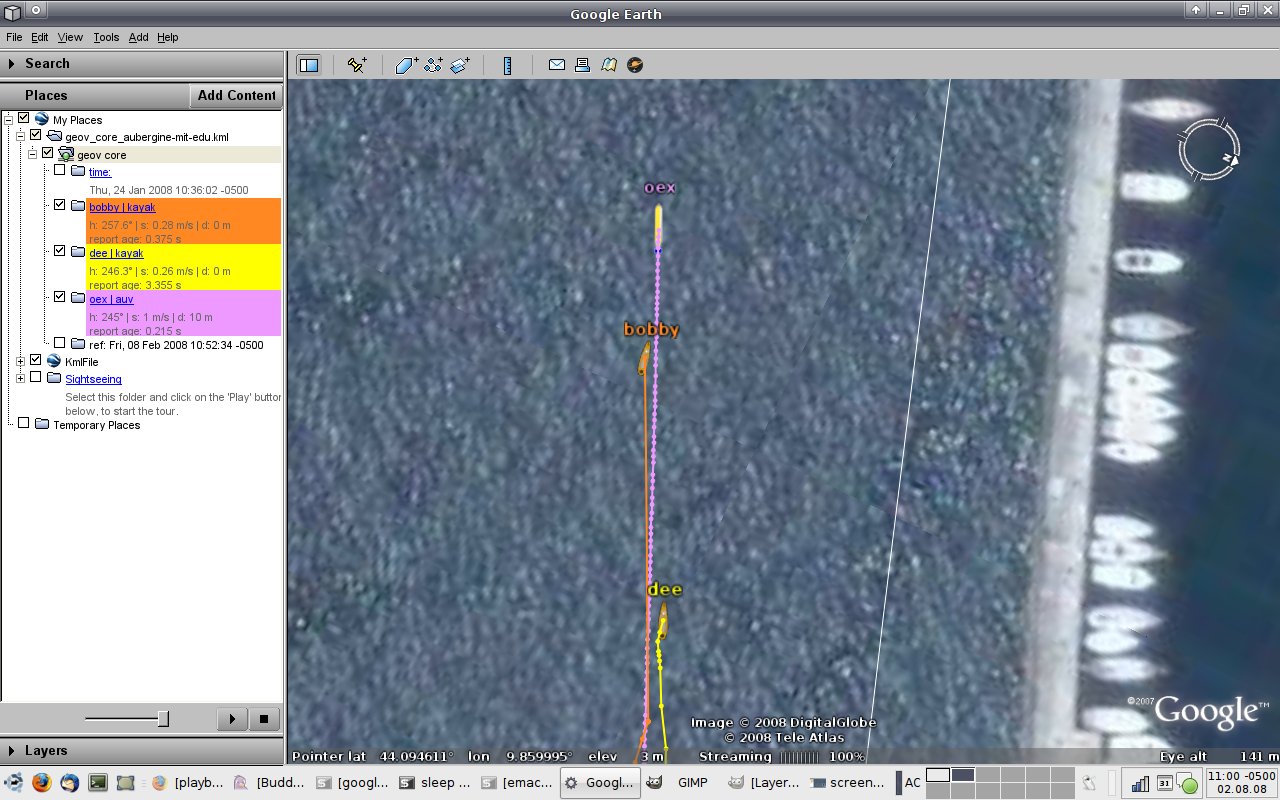
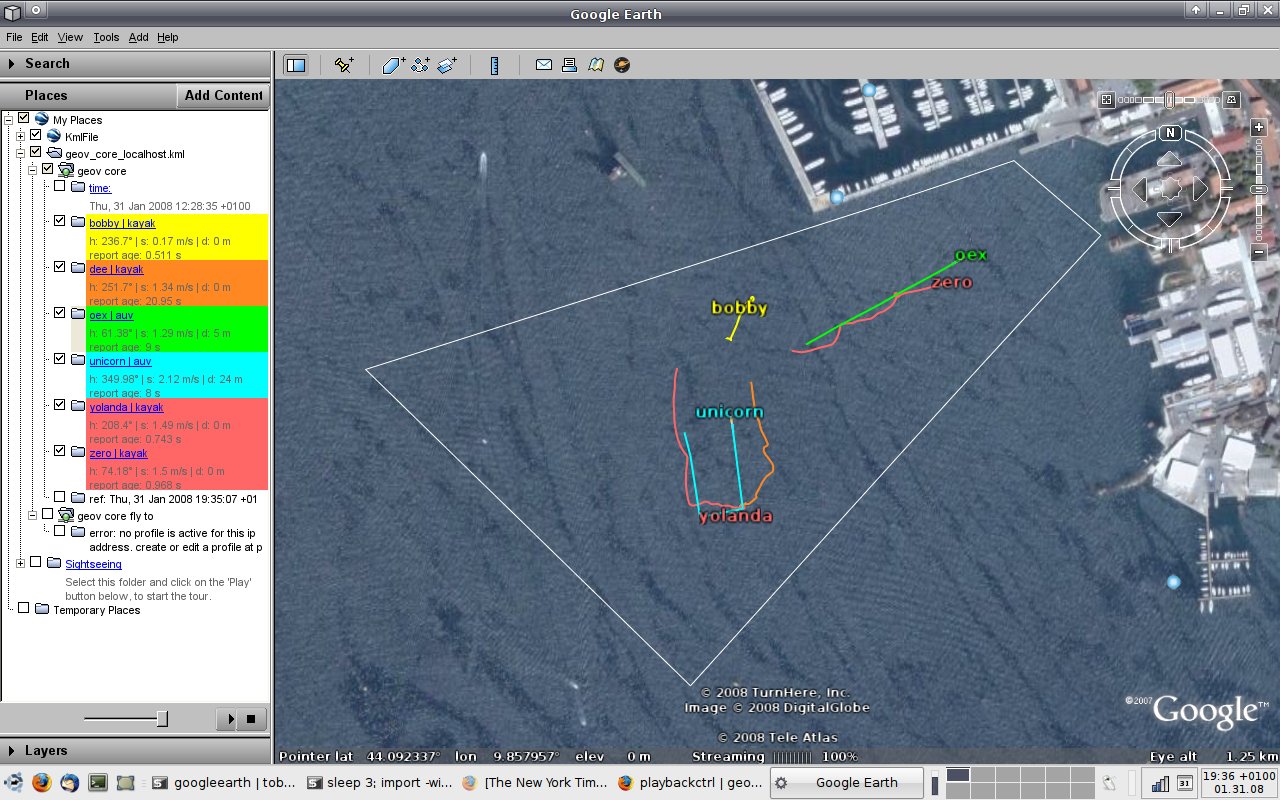
example screenshots of geov during cclnet08 exercises in la spezia, italy (realtime / playback mode):
example screenshot of history mode (simulated vehicles):